abb机器人编程指令入门(直接教你0基础学会编程)
哈喽,大家上午好呀~

小智又来更新技术文章咯!这次是工业机器人ABB系列,大家可以结合之前的学习内容,我会放在文章末尾~跟进现在的内容继续学习哈!
在之前的文章中,相信你已经对ABB机器人的MOVE指令以及常用专属名词有一定的了解了,而从这篇文章开始,继续学习新的编程常用指令。
1.Procall调用程序。
在ABB的编程中,一个程序可以被多次调用,而在示教器中,可以通过Procall调用其他的程序。
用法如下:
在主程序中,选中proccall。
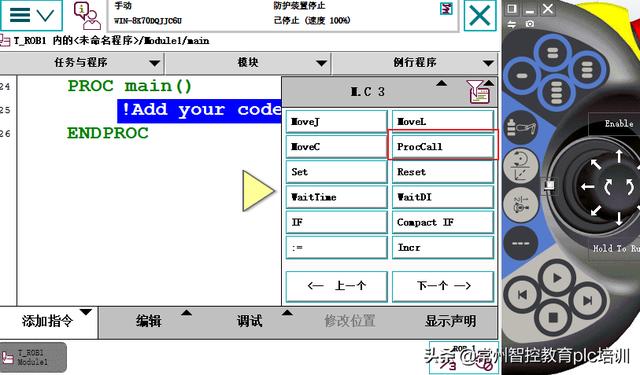
点击PROCCALL之后,会出现如下弹窗:
“弹窗中显示的都是可以被调用的程序,如图所示,可调用的程序共2个:main主程序以及一个routine子程序。值得注意的是,在主程序中,也是可以调用主程序的”
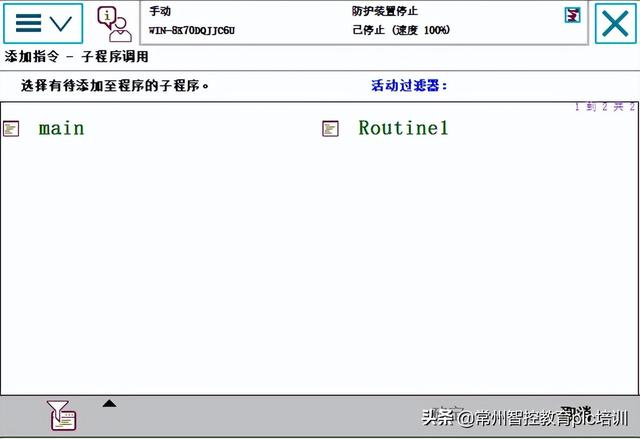
根据需要来选择程序即可,在这次的讲解中,以调用routine1为例:
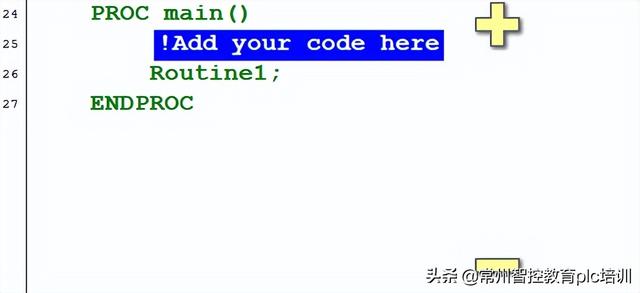
选中routine1后,点击确定即可。
确定完成之后,就可以在示教器的主程序中看到刚刚调用的子程序routine1了(如下图所示)
值得注意的是,在示教器中编程调用程序的话,是可以通过proccall,而在robstudio中编程,则可以直接通过复制程序的名称,然后粘贴到main主程序中。
当然了,proccall调用子程序的数量也并非是无限的:
“程序可相互调用,也可反过来调用另一个程序。程序亦可自我调用,即递归调用。允许的程序等级取决于参数数量。通常允许10级以上”
2.stop指令。
熟悉英语的人应该都清除,stop就是停止的含义,而在ABB编程中,stop指令同样也是如此:
“在ABB编程中,stop指令就是停止程序的运行,相当于示教器中的停止键”
通常,也是在程序段的末尾使用stop指令,在执行完该指令后,机器人的程序就会处于停止状态,直到再次启动程序的运行。
好了,这就是本篇文章所介绍的机器人常用指令中的2个:proccall以及stop,在下一篇文章中,我会继续其他的ABB常用的指令。
如果遇到问题或者不能理解的地方可以私信我们。
,







- 爱自己文案高级感(【文案】不烂大街的高级感生日文案)
- 最好吃的辣椒油的制作方法(原来诀窍这么简单)
- 吃抗癫痫药对生育有影响吗(癫痫病人不能结婚生子)
- word里面如何单独设置内框线(表格框线、行间框线、底纹、套用样式)
- 4000元台式电脑配置单(2023年7月台式电脑DIY配置单参考(附电脑硬件推荐))
- 小提琴五根弦是什么(提琴有几根琴弦构成)
- 如何看待中日关系作文(风月同天)
- word怎样设置项目符号和编号(原来也能这样设置)
- 泰式风味汁柠檬鸡爪(泰式柠檬凤爪)
- 华为手机安装应用验证失败(1时提示“安装包验证失败”如何解决)
- 国际商标注册收费标准(欧盟商标注册费用)
- 包茎手术好了什么样子(终于下定决心做包皮手术)
- 乌拉尔联邦大学宿舍图(俄罗斯留学-乌拉尔联邦大学)
- 旅行小妙招简单实用(你一定用得上)
- 好奇心害死猫图片(完美展示了猫咪的好奇心)
- word怎样把图片裁剪成各种形状(5大招全方位助你一键搞定)
- 鸡蛋如何吃营养更好(鸡蛋怎么吃最营养)
- 和人相处三种人不能深交(千万不要深交)







